Code Appendix
# camera_control.py
import subprocess
subprocess.run('sudo pigpiod', shell=True, check=True)
import mediapipe
import cv2
import pygame
from pygame.locals import * # for event MOUSE variables
import sys
import os
from flask import Flask
from flask import request
import json
import logging
import threading
import RPi.GPIO as GPIO
import time
import requests
from hand_display import main as manual_main
from Finger_Control_pigpio import process_data as process_data
from Finger_Control_pigpio import set_angle, coord_to_angle
from Finger_Control_pigpio import pi
import pigpio
# init and run flask
# block start ==============================================
app = Flask(__name__)
log = logging.getLogger("werkzeug")
log.setLevel(logging.ERROR)
test_data = []
data = json.dumps(test_data)
@app.route("/hand_landmark/", methods=["POST"])
def determine_escalation():
request_data = request.get_json()
requests = json.loads(request_data)
# stuff happens here that involves data to obtain a result
print(requests)
global data
# print(data)
return data
def run_flask_app():
app.run(host="0.0.0.0", port=5006)
flask_thread = threading.Thread(target=run_flask_app)
flask_thread.daemon = True
flask_thread.start()
# block end ==============================================
os.putenv("SDL_VIDEODRIVER", "fbcon") # Display on piTFT
os.putenv("SDL_FBDEV", "/dev/fb0")
os.putenv("SDL_MOUSEDRV", "TSLIB") # Track mouse clicks on piTFT
os.putenv("SDL_MOUSEDEV", "/dev/input/touchscreen")
# setup gpio
GPIO.setmode(GPIO.BCM)
def GPIO27_callback(channel):
global add_button
add_button = True
def GPIO22_callback(channel):
subprocess.Popen(["sudo", "killall", "pigpiod"])
global flag
flag = False
def GPIO23_callback(channel):
global delete_button
delete_button = True
def GPIO17_callback(channel):
global play_all
play_all = True
# physical quit button for gpio
GPIO.setup(22, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(22, GPIO.FALLING, callback=GPIO22_callback, bouncetime=300)
# physical add button for gpio
GPIO.setup(27, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(27, GPIO.FALLING, callback=GPIO27_callback, bouncetime=300)
# physical delete button for gpio
GPIO.setup(23, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(23, GPIO.FALLING, callback=GPIO23_callback, bouncetime=300)
# physical play all button for gpio
GPIO.setup(17, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(17, GPIO.FALLING, callback=GPIO17_callback, bouncetime=300)
# end setup gpio
# datastructure for gesture storage, if dict item is Null, the value is -1
gestureDict_path = "/home/pi/robotArm/temp/gesture.json"
gesture_number = 20
gesturePage = 0
defaultGesture = [179, 0, 179, 179, 179, 179]
gestureDict = {}
# init gesture json data as all -1
for i in range(gesture_number):
gestureDict[str(i)] = gestureDict.get(str(i), -1)
with open(gestureDict_path, 'w') as file:
json.dump(gestureDict, file, indent=2)
# setup flags
flag = True
show_hand = False
show_stack = True
show_joint = False
add_button = False
delete_button = False
play_all = False
play_button_clicked = False
# init and run Pygame
pygame.init()
# screen of pitft
screen_width = 320
screen_height = 240
screen = pygame.display.set_mode((screen_width, screen_height))
# parameters of stack block on stack screen
# start block ******************************************
# define block number and size
num_blocks = 10
block_width = screen_width // num_blocks
block_height = screen_height
# define color
font = pygame.font.Font(None, 15)
colors = [
(255, 242, 230),
(155, 210, 206),
(179, 226, 206),
(125, 196, 166),
(179, 226, 206),
(155, 210, 206),
(255, 242, 230),
(155, 210, 206),
(179, 226, 206),
(125, 196, 166)
]
# define Flip button's position and size
flip_width = 30
flip_height = 70
flip_x = screen_width - flip_width - 20
flip_y = screen_height - flip_height - 10
main_button_width = 50
main_button_height = 70
button_margin = 10
video_button_x = 200 - main_button_width - button_margin
video_button_y = screen_height - main_button_height - button_margin
manual_button_x = video_button_x - main_button_width - button_margin
manual_button_y = screen_height - main_button_height - button_margin
play_button_x = manual_button_x - main_button_width - button_margin
play_button_y = screen_height - main_button_height - button_margin
# setup background colors of stack screen
def initializeScreen():
# clean screen
screen.fill((255, 255, 255))
# paint color
for i in range(num_blocks):
block_color = colors[i % len(colors)]
block_rect = pygame.Rect(i * block_width, 0, block_width, block_height / 2)
pygame.draw.rect(screen, block_color, block_rect)
# draw Flip
pygame.draw.rect(screen, (0, 255, 0), (flip_x, flip_y, flip_width, flip_height))
button_text = pygame.transform.rotate(font.render("Flip", True, (0, 0, 0)), 90)
button_text_rect = button_text.get_rect(
center=(flip_x + flip_width // 2, flip_y + flip_height // 2)
)
screen.blit(button_text, button_text_rect)
# draw Video
pygame.draw.rect(
screen,
(241, 170, 50),
(video_button_x, video_button_y, main_button_width, main_button_height),
)
video_button_text = pygame.font.Font(None, 20).render(
"Video", True, (255, 255, 255)
)
video_button_text = pygame.transform.rotate(video_button_text, 90)
video_button_text_rect = video_button_text.get_rect(
center=(
video_button_x + main_button_width // 2,
video_button_y + main_button_height // 2,
)
)
screen.blit(video_button_text, video_button_text_rect)
# draw Manual
pygame.draw.rect(
screen,
(241, 170, 50),
(manual_button_x, manual_button_y, main_button_width, main_button_height),
)
manual_button_text = pygame.font.Font(None, 20).render(
"Manual", True, (255, 255, 255)
)
manual_button_text = pygame.transform.rotate(manual_button_text, 90)
manual_button_text_rect = manual_button_text.get_rect(
center=(
manual_button_x + main_button_width // 2,
manual_button_y + main_button_height // 2,
)
)
screen.blit(manual_button_text, manual_button_text_rect)
# draw Play
pygame.draw.rect(
screen,
(241, 170, 50),
(play_button_x, play_button_y, main_button_width, main_button_height),
)
play_button_text = pygame.font.Font(None, 20).render("Play", True, (255, 255, 255))
play_button_text = pygame.transform.rotate(play_button_text, 90)
play_button_text_rect = play_button_text.get_rect(
center=(
play_button_x + main_button_width // 2,
play_button_y + main_button_height // 2,
)
)
screen.blit(play_button_text, play_button_text_rect)
# update
pygame.display.flip()
# parameters for changing color of stack screen
color_resume = (255, 255, 255)
clicked = -1
clock = pygame.time.Clock()
start_time = time.time()
# end block *******************************************
# parameters of back button on hand screen
button_width = 40
button_height = 80
button_x = 10 # back button
button_y = screen_height - button_height - 10 # back button
hand_font = pygame.font.Font(None, 24)
drawingModule = mediapipe.solutions.drawing_utils
handsModule = mediapipe.solutions.hands
cap = cv2.VideoCapture(0)
fourcc = cv2.VideoWriter_fourcc("m", "p", "4", "v")
with handsModule.Hands(
static_image_mode=False,
min_detection_confidence=0.7,
min_tracking_confidence=0.7,
max_num_hands=1,
) as hands:
while flag:
ret, frame = cap.read()
flipped = cv2.flip(frame, flipCode=-1)
frame1 = cv2.resize(flipped, (640, 480))
results = hands.process(cv2.cvtColor(frame1, cv2.COLOR_BGR2RGB))
if results.multi_hand_landmarks is not None:
for handLandmarks in results.multi_hand_landmarks:
drawingModule.draw_landmarks(
frame1, handLandmarks, handsModule.HAND_CONNECTIONS
)
result_dic = []
for j in handLandmarks.landmark:
joint_list = [round(j.x, 4), round(j.y, 4), 0, 0]
result_dic.append(joint_list)
if result_dic:
data = json.dumps(result_dic, indent=4)
if data is not None:
process_data(data)
if show_hand:
frame1 = cv2.cvtColor(frame1, cv2.COLOR_BGR2RGB)
pygame_frame = pygame.surfarray.make_surface(frame1)
screen.fill((0, 0, 0))
screen.blit(pygame_frame, (0, 0))
# draw Back button
pygame.draw.rect(
screen, (255, 0, 0), (button_x, button_y, button_width, button_height)
)
button_text = pygame.transform.rotate(
hand_font.render("Back", True, (255, 255, 255)), 90
)
button_text_rect = button_text.get_rect(
center=(button_x + button_width // 2, button_y + button_height // 2)
)
screen.blit(button_text, button_text_rect)
# function of add button
if add_button:
print("add button pressed")
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
add_gesture = -1
for i in range(gesture_number):
if gestureDict.get(str(i), -1) == -1:
add_gesture = i
# print("NONE")
break
# print(add_gesture)
# if add too much gesture, render a hint not too add more
if add_gesture == -1:
text_surface = pygame.transform.rotate(
hand_font.render(
"adding too much, delete first", True, (255, 0, 0)
),
90,
)
text_rect = text_surface.get_rect(
center=(screen_width // 2, screen_height // 2)
)
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(2)
else:
conv = ["hand show request for data"]
s = json.dumps(conv)
data_add = requests.post(
"http://0.0.0.0:5006/hand_landmark/", json=s
).json()
if data_add:
gestureDict[str(add_gesture)] = data_add
render_text = "Successfully Added Gesture " + str(add_gesture)
text_surface = pygame.transform.rotate(
hand_font.render(render_text, True, (0, 255, 0)),
90,
)
text_rect = text_surface.get_rect(
center=(screen_width // 2, screen_height // 2)
)
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(1)
with open(gestureDict_path, "w") as file:
json.dump(gestureDict, file, indent=2)
else:
render_text = "Invalid Data"
text_surface = pygame.transform.rotate(
hand_font.render(render_text, True, (255, 0, 0)),
90,
)
text_rect = text_surface.get_rect(center=(screen_width // 2, screen_height // 2))
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(1)
add_button = False
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
elif event.type is MOUSEBUTTONDOWN:
mouse_x, mouse_y = event.pos
if (
button_x <= mouse_x <= button_x + button_width
and button_y <= mouse_y <= button_y + button_height
):
print("Back Button Clicked")
# show another page
show_hand = False
show_stack = True
if show_stack:
initializeScreen()
# function of play all button
if play_all:
print("play all")
time.sleep(0.5)
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
for i in range(gesture_number):
move = gestureDict.get(str(i), -1)
if move != -1:
if len(move) > 7:
set_angle(coord_to_angle(move))
else:
set_angle(move)
time.sleep(1)
text_surface = pygame.transform.rotate(
font.render("Play All Gestures Finised", True, (0, 0, 255)),
90,
)
text_rect = text_surface.get_rect(center=(screen_width // 2, screen_height // 2))
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(2)
play_all = False
# function of add button
if add_button:
print("add button pressed")
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
add_gesture = -1
for i in range(gesture_number):
if gestureDict.get(str(i), -1) == -1:
add_gesture = i
# print("NONE")
break
# print(add_gesture)
# if add too much gesture, render a hint not too add more
if add_gesture == -1:
text_surface = pygame.transform.rotate(
font.render("adding too much, delete first", True, (255, 0, 0)),
90,
)
text_rect = text_surface.get_rect(
center=(screen_width // 2, screen_height // 2)
)
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(2)
else:
conv = ["gesture stack request for data"]
s = json.dumps(conv)
data_add = requests.post(
"http://0.0.0.0:5006/hand_landmark/", json=s
).json()
if data_add:
gestureDict[str(add_gesture)] = data_add
render_text = "Successfully Added Gesture " + str(add_gesture)
text_surface = pygame.transform.rotate(
hand_font.render(render_text, True, (0, 255, 0)),
90,
)
text_rect = text_surface.get_rect(center=(screen_width // 2, screen_height // 2))
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(1)
with open(gestureDict_path, "w") as file:
json.dump(gestureDict, file, indent=2)
else:
render_text = "Invalid Data"
text_surface = pygame.transform.rotate(
hand_font.render(render_text, True, (255, 0, 0)),
90,
)
text_rect = text_surface.get_rect(center=(screen_width // 2, screen_height // 2))
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(1)
add_button = False
# function of delete button
if delete_button:
print("delete button pressed")
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
if colors[clicked] == (255, 255, 255):
# print("deleting you!", clicked)
delete_item = (gesture_number // 2) * gesturePage + clicked
for i in range(delete_item, gesture_number):
gestureDict[str(i)] = gestureDict.get(str(i + 1), -1)
# print(i, gestureDict[str(i)])
colors[clicked] = color_resume
with open(gestureDict_path, "w") as file:
json.dump(gestureDict, file, indent=2)
delete_button = False
# touchscreen to change the color of the block and get the want to be changed number
current_time = time.time()
if current_time - start_time >= 10 and clicked != -1:
colors[clicked] = color_resume
for event in pygame.event.get():
if event.type is MOUSEBUTTONDOWN:
pos = pygame.mouse.get_pos()
x, y = pos
if (
play_button_x <= x <= play_button_x + main_button_width
and play_button_y <= y <= play_button_y + main_button_height
):
print("Play Button Clicked")
play_button_clicked = True
time.sleep(0.5)
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
# print(colors[clicked])
if colors[clicked] == (255, 255, 255):
# print("play it!", clicked)
played_item = (gesture_number // 2) * gesturePage + clicked
played_gesture = gestureDict.get(str(played_item), -1)
if played_gesture == -1:
if len(defaultGesture) > 7:
set_angle(coord_to_angle(defaultGesture))
else:
set_angle(defaultGesture)
play_button_clicked = False
# default gesture
else:
if len(played_gesture) > 7:
# print(played_gesture)
# print(type(played_gesture))
set_angle(coord_to_angle(played_gesture))
else:
played_gesture = [int(item) for item in played_gesture]
# print(played_gesture)
# print(type(played_gesture))
set_angle(played_gesture)
play_button_clicked = False
# played_gesture
time.sleep(0.01)
colors[clicked] = color_resume
if clicked != -1:
# print(play_button_clicked)
colors[clicked] = color_resume
elif event.type is MOUSEBUTTONUP:
pos = pygame.mouse.get_pos()
x, y = pos
# print('current position is ', x, y)
if y < 120:
clicked = x // block_width
print("clicking the ", clicked)
color_resume = colors[clicked]
colors[clicked] = (255, 255, 255)
start_time = time.time()
elif (
flip_x <= x <= flip_x + flip_width
and flip_y <= y <= flip_y + flip_height
):
print("click flip")
if gesturePage == 0:
gesturePage = 1
else:
gesturePage = 0
elif (
video_button_x <= x <= video_button_x + main_button_width
and video_button_y <= y <= video_button_y + main_button_height
):
print("Video Button Clicked")
show_stack = False
show_joint = False
show_hand = True
elif (
manual_button_x <= x <= manual_button_x + main_button_width
and manual_button_y <= y <= manual_button_y + main_button_height
):
print("Manual Button Clicked")
show_joint = True
show_hand = False
show_stack = False
# play selected gesture
# find key in gesture diction, if the gesture is None, fill with default gesture
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
for i in range(num_blocks):
block_x = i * block_width
j = gesturePage * (gesture_number // 2) + i
gesture = gestureDict.get(str(j), -1)
text_to_show = ""
# to be modified ################################################### send gesture data to hand
if gesture != -1:
text_to_show = "GESTURE" + str(j)
else:
text_to_show = "# DEFAULT"
text_surface = pygame.transform.rotate(
font.render(text_to_show, True, (0, 0, 0)), 90
)
text_rect = text_surface.get_rect(
center=(block_x + block_width // 2, screen_height // 4)
)
screen.blit(text_surface, text_rect)
if show_joint:
show_joint = manual_main()
show_stack = True
show_hand = False
pygame.display.flip()
pygame.time.Clock().tick(30)
# Finger_Control_pigpio.py
import sys
import RPi.GPIO as GPIO
import time
import numpy as np
import math
from flask import Flask
from flask import request, g
import json
import threading
import logging
from queue import Queue
import requests
# GPIO.setmode(GPIO.BCM)
# GPIO.setup(22, GPIO.IN, pull_up_down=GPIO.PUD_UP)
import heapq
import pigpio
import subprocess
data = None
# subprocess.call('sudo pigpiod', shell=True)
# subprocess.Popen(["sudo", "pigpiod"])
# Connect to the pigpio daemon
pi = pigpio.pi()
if not pi.connected:
print("Unable to connect to pigpio daemon.")
exit()
# ratio_above = [-1,-1,-1,-1,-1]
# ratio_below = [-1,-1,-1,-1,-1]
# ratio_above =[0.8971048551609604, 0.8954669333844456, 0.9998759579498151, 1.0368234362768092, 0.9765926489672645]
# ratio_below =[0.8001693907401342, 0.1749117834033477, 0.19303624173106138, 0.29275206567100726, 0.42182779670142717]
ratio_above = [
1.0316524181500226,
0.8954669333844456,
0.9998759579498151,
1.0368234362768092,
0.9765926489672645,
]
ratio_below = [
0.8001693907401342,
0.38944473659975983,
0.200062642108565,
0.29275206567100726,
0.42182779670142717,
]
# thumb_ratio = [9999,-1] #min,max
# thumb_ratio = [0.6997189498609505, 1.3314314498941338]
thumb_ratio = [0.2835444150171337, 0.5]
# Set the GPIO pin for the servo
############## ##############
# finger0 -> GPIO 16 (rotate the finger1)
# finger1 -> GPIO 5
# finger2 -> GPIO 6
# finger3 -> GPIO 13
# finger4 -> GPIO 19
# finger5 -> GPIO 26
pins = [16, 5, 6, 13, 19, 26]
# Set the PWM frequency (usually around 50 Hz)
for pin in pins:
pi.set_mode(pin, pigpio.OUTPUT)
pi.set_PWM_frequency(pin, 50)
# Set the initial position of the servo
initial_position = [0, 0, 0, 0, 0, 0]
initial_position[0] = 130 # In degrees (range: 110 - 180)
initial_position[1] = 90
initial_position[2] = 90
initial_position[3] = 90
initial_position[4] = 90
initial_position[5] = 90
def cosin_angle(x1, y1, x2, y2, x3, y3):
dot_product = (x2 - x1) * (x3 - x2) + (y2 - y1) * (y3 - y2)
length_v1 = math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
length_v2 = math.sqrt((x3 - x2) ** 2 + (y3 - y2) ** 2)
cos_theta = dot_product / (length_v1 * length_v2)
angle_rad = math.acos(cos_theta)
angle_deg = min(180, math.degrees(angle_rad))
return 180 - angle_deg
def set_angle(angle):
if angle is None or angle == False:
return False
# angle 0 is [110,180]
# angle 1 is [0,120]
angle[0] = min(max(angle[0], 110), 180)
angle[1] = min(max(angle[1], 0), 120)
calculated_angle = angle
for i in range(2, 6):
calculated_angle[i] = max(calculated_angle[i], 0)
calculated_angle[i] = min(calculated_angle[i], 180)
# calculate and store the dutycycle
duty_cycle = []
duty_cycle.append(
((180 - calculated_angle[0]) / 0.09) + 500
) # Map angle (0-180 degrees) to duty cycle (2-12), 2 could be changed to 2.5
duty_cycle.append(((180 - calculated_angle[1]) / 0.09) + 500)
duty_cycle.append((calculated_angle[2] / 0.09) + 500)
duty_cycle.append((calculated_angle[3] / 0.09) + 500)
duty_cycle.append(((180 - min(170, calculated_angle[4])) / 0.09) + 500)
duty_cycle.append(((180 - calculated_angle[5]) / 0.09) + 500)
# change the pwm and set the dutycycle
for i in range(6):
pi.set_servo_pulsewidth(pins[i], duty_cycle[i])
def get_ratio(data):
coordinates = data
flag_presence = True
for i in range(21):
if coordinates[i][3] != 0:
flag_presence = False
if flag_presence == False:
print("Not all points are in the camera!")
return False
# get coodinates for specific joints
# coord=[x,y,visibility,presence]
coord_whist = coordinates[0]
# get the coordinates of each finger
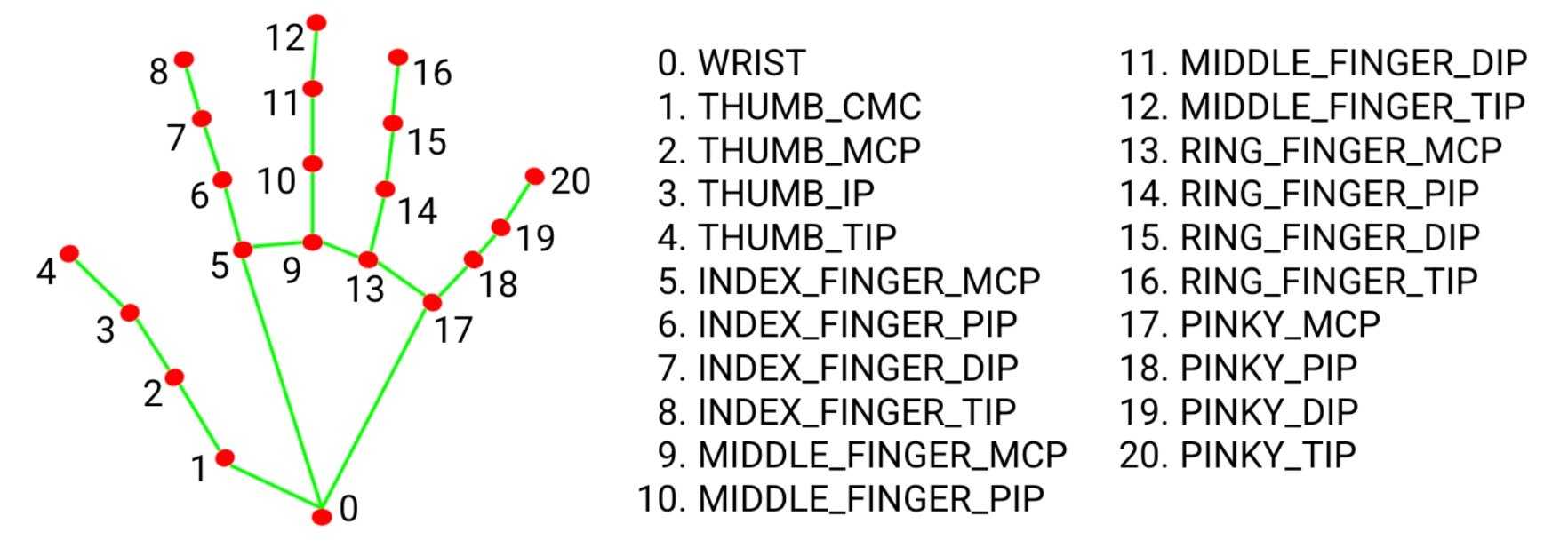
finger_index = [4, 8, 12, 16, 20]
coord_finger = [coordinates[i] for i in finger_index]
# [x,y,v,p]
# get the coordinates of each joint
joint_index = [2, 5, 9, 13, 17]
coord_joint = [coordinates[i] for i in joint_index]
# get the distance from wrist to each finger
distance_to_f = [get_distance(coord_whist, coord_finger[i]) for i in range(5)]
# get the distance from wrist to each joint
distance_to_j = [get_distance(coord_whist, coord_joint[i]) for i in range(5)]
# get the distance from joint to each finger
distance_jf = [get_distance(coord_finger[i], coord_joint[i]) for i in range(5)]
distance_thumb = distance_from_point_to_line(
coord_joint[4], coord_whist, coord_joint[0]
)
Ratio = [
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
] # [1-5 is finger ratio, 6 is thumb ratio]
Ratio[5][0] = distance_thumb / distance_to_j[4] # this is thumb distance
for i in range(5):
if distance_to_f[i] >= distance_to_j[i]:
Ratio[i][0] = 1 # [0 -> above, 1 -> below]
else:
Ratio[i][0] = 0
Ratio[i][1] = distance_jf[i] / distance_to_j[i]
return Ratio
def get_max_ratio(Ratio):
global ratio_above, ratio_below, thumb_ratio
for i in range(5):
if Ratio[i][0] == 1:
ratio_above[i] = max(ratio_above[i], Ratio[i][1])
else:
ratio_below[i] = max(ratio_below[i], Ratio[i][1])
thumb_ratio[0] = min(Ratio[5][0], thumb_ratio[0])
thumb_ratio[1] = max(Ratio[5][0], thumb_ratio[1])
def get_distance(coord1, coord2):
x1 = coord1[0]
y1 = coord1[1]
x2 = coord2[0]
y2 = coord2[1]
return math.sqrt((x1 - x2) * (x1 - x2) + (y1 - y2) * (y1 - y2))
def distance_from_point_to_line(x, y, z): # from z to xy
x1, y1, _, _ = x
x2, y2, _, _ = y
x3, y3, _, _ = z
numerator = abs((x3 - x1) * (y2 - y1) - (x2 - x1) * (y3 - y1))
denominator = math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
distance = numerator / denominator
return distance
def coord_to_angle(data): # input:data, Output: angle
# handness=HandLandmarkerResult[0]
# if handness['display_name'] != 'Left':
# print('Left hand not detected!')
# return False
if data is None or data == False:
return False
# get the set of coordinates
# hand_landmarks=HandLandmarkerResult[1]
# coordinates = hand_landmarks[0]
global ratio_above, ratio_below
coordinates = data
# check every point is in the camera
flag_presence = True
for i in range(21):
if coordinates[i][3] != 0:
flag_presence = False
if flag_presence == False:
print("Not all points are in the camera!")
return False
# get coodinates for specific joints
# coord=[x,y,visibility,presence]
coord_whist = coordinates[0]
# get the coordinates of each finger
finger_index = [4, 8, 12, 16, 20]
coord_finger = [coordinates[i] for i in finger_index]
# [x,y,v,p]
angle1 = cosin_angle(
coordinates[1][0],
coordinates[1][1],
coordinates[2][0],
coordinates[2][1],
coordinates[3][0],
coordinates[3][1],
)
angle2 = cosin_angle(
coordinates[2][0],
coordinates[2][1],
coordinates[3][0],
coordinates[3][1],
coordinates[4][0],
coordinates[4][1],
)
# get the coordinates of each joint
joint_index = [2, 5, 9, 13, 17]
coord_joint = [coordinates[i] for i in joint_index]
# get the distance from wrist to each finger
distance_to_f = [get_distance(coord_whist, coord_finger[i]) for i in range(5)]
# get the distance from wrist to each joint
distance_to_j = [get_distance(coord_whist, coord_joint[i]) for i in range(5)]
# get the distance from joint to each finger
distance_jf = [get_distance(coord_finger[i], coord_joint[i]) for i in range(5)]
distance_thumb = distance_from_point_to_line(
coord_joint[4], coord_whist, coord_joint[0]
)
ratio_thumb = distance_thumb / distance_to_j[4]
# print('ratio thumb = ', ratio_thumb)
# print('')
# print('ratio above = ',ratio_above)
# print('ratio below = ',ratio_below)
# print(' ')
Angle = [0, 0, 0, 0, 0, 0]
Angle_threshold = [180, 120, 150, 120, 70, 110] # [1-5,thumb]
# calcualte angle of finger 2
for i in range(5):
ratio = distance_jf[i] / distance_to_j[i]
# if finger above joint
if distance_to_f[i] >= distance_to_j[i]:
Angle[i + 1] = Angle_threshold[i] * (1 - ratio / ratio_above[i])
else:
Angle[i + 1] = (180 - Angle_threshold[i]) * (
1 - min(1, ratio / ratio_below[i])
) + Angle_threshold[i]
Angle[0] = Angle_threshold[5] + (180 - Angle_threshold[5]) * (
thumb_ratio[1] - ratio_thumb
) / (thumb_ratio[1] - thumb_ratio[0])
total_angle = angle1 + angle2
Angle[1] = 120 - ((total_angle - 240))
print(Angle[1])
return Angle
def find_median(nums):
min_heap = []
max_heap = []
for num in nums:
heapq.heappush(max_heap, -num)
while len(max_heap) > len(min_heap):
heapq.heappush(min_heap, -heapq.heappop(max_heap))
if len(min_heap) == len(max_heap):
return (min_heap[0] - max_heap[0]) / 2
else:
return min_heap[0]
def call_data():
global data
while 1:
conv = ["request for data"]
s = json.dumps(conv)
data = requests.post("http://0.0.0.0:5003/hand_landmark/", json=s).json()
print(data[0][0])
# 1 means run
# 0 means test
flag_state = 1
######################### MAIN FUNCTION ################################
def _main():
th = threading.Thread(target=call_data)
th.daemon = True
set_angle(initial_position)
time.sleep(1)
try:
while True:
if flag_state == 0:
while not data:
print("waiting for data")
time.sleep(1)
Ratio = []
start_time = time.time()
print("=============TEST START==============")
while time.time() - start_time <= 10:
Ratio = get_ratio(data)
get_max_ratio(Ratio)
print("=============TEST END==============")
# print('ratio above : ',ratio_above)
# print('')
# print('ratio below : ',ratio_below)
# print('')
# print('thumb ratio ', thumb_ratio)
continue
if flag_state == 1:
print("waiting for data")
th.start()
while not data:
time.sleep(0.01)
print("==============START RUNNING==============")
# create a queue to store data
data_queue = Queue()
queue_size = 5
while 1:
if data_queue.qsize() < queue_size: # store 5 images
data_queue.put(data)
continue
###################################### FILTER #####################################################
# put the current image and do the filter
data_pop = data_queue.get() # get and pop the first data
datas = []
for i in range(queue_size - 1):
datas.append(data_queue.get())
datas.append(data)
#
filtered_data = []
for index in range(21):
cur_x = []
cur_y = []
for data in datas:
cur_x.append(data[index][0])
cur_y.append(data[index][1])
mid_x = find_median(cur_x)
mid_y = find_median(cur_y)
filtered_data.append([mid_x, mid_y, 0, 0])
# print(filtered_data)
for data in datas: #
data_queue.put(data)
###################################################################################################
target_position = coord_to_angle(filtered_data)
if target_position == False:
continue
# print(target_position)
set_angle(target_position)
time.sleep(0.01) # Wait for the0 servos to move
# if not GPIO.input(22):
# print('===============END RUNNING===============')
# break
continue
# change frequency (cannot use currently)
if angles_input == "chf":
ch_ferq = input("Please enter the frequency")
# ChangeFreq(int(ch_ferq))
continue
# test the finger
if angles_input == "test":
angle = 0
for i in range(180):
set_angle(angle, angle, angle, angle, angle, angle)
time.sleep(0.02)
angle += 1
for i in range(180):
set_angle(angle, angle, angle, angle, angle, angle)
time.sleep(0.02)
angle -= 1
continue
target_position = []
if len(angles) == 6:
target_position[0] = int(angles[0].strip())
target_position[1] = int(angles[1].strip())
target_position[2] = int(angles[2].strip())
target_position[3] = int(angles[3].strip())
target_position[4] = int(angles[4].strip())
target_position[5] = int(angles[5].strip())
set_angle(
target_position[0],
target_position[1],
target_position[2],
target_position[3],
target_position[4],
target_position[5],
)
time.sleep(1) # Wait for the0 servos to move
elif len(angles) == 1:
target_position_all = int(angles[0].strip())
set_angle(
target_position_all,
target_position_all,
target_position_all,
target_position_all,
target_position_all,
target_position_all,
)
time.sleep(1) # Wait for the servos to move
elif len(angles) == 2: # input (num,angle)
num = int(angles[0].strip())
target_angle = int(angles[1].strip())
target_position = [0, 0, 0, 0, 0, 0]
target_position[num] = target_angle
set_angle(target_position)
time.sleep(1) # Wait for the0 servos to move
else:
print("Please enter exactly six angles separated by commas.")
except KeyboardInterrupt:
pass
finally:
# Clean up and reset the GPIO
th.join()
pi.stop()
GPIO.cleanup()
# by default, the data is valid
data_queue = Queue()
def process_data(data):
data = json.loads(data)
global initial_position, flag_state
global data_queue
queue_size = 5
if flag_state == 0:
Ratio = []
start_time = time.time()
print("=============TEST START==============")
while time.time() - start_time <= 10:
Ratio = get_ratio(data)
get_max_ratio(Ratio)
print("=============TEST END==============")
return
if flag_state == 1:
# print('==============START RUNNING==============')
# print('')
# print(len(data))
if not data or data == None:
return
if data_queue.qsize() < queue_size: # store 5 images
data_queue.put(data)
print("Creating Queue")
return
###################################### FILTER #####################################################
# put the current image and do the filter
data_pop = data_queue.get() # get and pop the first data
datas = []
for i in range(queue_size - 1):
datas.append(data_queue.get())
datas.append(data)
#
filtered_data = []
for index in range(21):
cur_x = []
cur_y = []
for data in datas:
cur_x.append(data[index][0])
cur_y.append(data[index][1])
mid_x = find_median(cur_x)
mid_y = find_median(cur_y)
filtered_data.append([mid_x, mid_y, 0, 0])
for data in datas: #
data_queue.put(data)
###################################################################################################
target_position = coord_to_angle(filtered_data)
if target_position == False or target_position is None:
return
set_angle(target_position)
time.sleep(0.01) # Wait for the0 servos to move
# Clean up and reset the GPIO
return
# hand_display.py
import sys
import json
import subprocess
subprocess.run("sudo pigpiod", shell=True, check=True)
import pygame
import time
from pygame.locals import * # for event MOUSE variables
import os
import RPi.GPIO as GPIO
import copy
from Finger_Control_pigpio import set_angle, pi
import pigpio
os.putenv("SDL_VIDEODRIVER", "fbcon") # Display on piTFT
os.putenv("SDL_FBDEV", "/dev/fb0")
os.putenv("SDL_MOUSEDRV", "TSLIB") # Track mouse clicks on piTFT
os.putenv("SDL_MOUSEDEV", "/dev/input/touchscreen")
# flags
add_button = False
pygame.init()
# subprocess.Popen(["sudo", "pigpiod"])
# Set up the Pygame window
screen_size = (320, 240)
screen = pygame.display.set_mode(screen_size)
pygame.display.set_caption("Hand Drawing")
black = (0, 0, 0)
white = (255, 255, 255)
red = (255, 0, 0)
blue = (0, 0, 255)
# draw add button
screen_width = 320
screen_height = 240
button_size = 50
button_rect = pygame.Rect(
screen_width - button_size, screen_height - button_size, button_size, button_size
)
def rotate(coord):
x = coord[0]
y = coord[1]
return y, 240 - x
# set the initial coordinate
joint_coord = [[180, 220], [100, 100], [140, 100], [180, 100], [220, 100]]
palm_coord = [[50, 220], [100, 160], [140, 160], [180, 160], [220, 160]]
finger_coord = [[120, 180], [20, 140], [20, 100], [20, 60], [20, 20]]
def is_point_valid(point, center, radius):
return (point[0] - center[0]) ** 2 + (point[1] - center[1]) ** 2 <= radius**2
# Set initial coordinates for draggable points
draggable_points = copy.copy(finger_coord)
draggable_points.append(joint_coord[0])
flag_down = False
# f0 #finger1 #finger2 finger3 finger4 #joint0
range_constraint = [
[],
[[20, 200], [120, 160]],
[[20, 200], [80, 120]],
[[20, 200], [40, 80]],
[[20, 200], [0, 40]],
[[160, 200], [160, 220]],
]
range_constraint[0] = [
[draggable_points[5][0] - 60, draggable_points[5][0] + 40],
[draggable_points[5][1] - 60, draggable_points[5][1] - 20],
]
def is_in_constraint(x, y, i):
if x in range(range_constraint[i][0][0], range_constraint[i][0][1]) and y in range(
range_constraint[i][1][0], range_constraint[i][1][1]
):
return True
else:
return False
def calculate_angle(
x, s0, s1, r0, r1
): # current value, current window(s0,s1),degree window(r0,r1) 0-180
return ((x - s0)) * (r1 - r0) / (s1 - s0) + r0
def is_point_in_rect(point, rect):
x, y = point
return rect.left <= x <= rect.right and rect.top <= y <= rect.bottom
# Main game loop
def main():
global add_button
selected_point = -1
deg = [0, 0, 0, 0, 0, 0]
finish_button_rect = pygame.Rect(10, 180, 30, 100)
global flag_down
Finish_status = False
while not Finish_status:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
elif event.type == pygame.MOUSEBUTTONDOWN:
# Check if any draggable point is clicked
flag_down = True
for i, point in enumerate(draggable_points):
if is_point_valid(event.pos, point, 20):
selected_point = i
# Check if the finish button is clicked
if is_point_in_rect(event.pos, finish_button_rect):
print("Finish button clicked.")
Finish_status = True
if button_rect.collidepoint(event.pos):
print("Button Clicked!")
add_button = True
elif flag_down and event.type == pygame.MOUSEMOTION and selected_point >= 0:
# Update the position of the selected draggable point
if is_in_constraint(event.pos[0], event.pos[1], selected_point):
if selected_point == 5: # if the current point is joint0
draggable_points[selected_point] = (180, event.pos[1])
# update the y axis of finger 1
draggable_points[0] = (
draggable_points[0][0],
draggable_points[selected_point][1] - 40,
)
# update the constraint for finger 1
range_constraint[0] = [
[draggable_points[5][0] - 60, draggable_points[5][0] + 40],
[draggable_points[5][1] - 60, draggable_points[5][1] - 20],
]
else:
draggable_points[selected_point] = (
event.pos[0],
(
range_constraint[selected_point][1][0]
+ range_constraint[selected_point][1][1]
)
/ 2,
)
elif event.type == pygame.MOUSEBUTTONUP:
flag_down = False
selected_point = -1
# Clear the screen
screen.fill(white)
# Draw the palm
pygame.draw.line(
screen, black, rotate([100, 160]), rotate([220, 160]), 3
) # Thumb
pygame.draw.line(
screen, black, rotate([220, 160]), rotate([220, 300]), 3
) # Index finger
pygame.draw.line(
screen, black, rotate([220, 300]), rotate([100, 300]), 3
) # Middle finger
pygame.draw.line(
screen, black, rotate([100, 300]), rotate([50, 220]), 3
) # Ring finger
pygame.draw.line(
screen, black, rotate([50, 220]), rotate([100, 160]), 3
) # Pinky finger
# Draw the finger points
for coord in draggable_points:
pygame.draw.circle(screen, red, (round(coord[0]), round(coord[1])), 10)
# Draw the joint
pygame.draw.circle(screen, blue, draggable_points[5], 10)
for coord in joint_coord[1:]:
pygame.draw.circle(screen, black, rotate(coord), 7)
# Draw the palm point
for coord in palm_coord:
pygame.draw.circle(screen, black, rotate(coord), 7)
# connect all these point
for i in range(1, 5):
pygame.draw.line(
screen, black, rotate(palm_coord[i]), rotate(joint_coord[i]), 3
)
for i in range(1, 5):
pygame.draw.line(
screen, black, rotate(joint_coord[i]), draggable_points[i], 3
)
pygame.draw.line(screen, black, rotate(palm_coord[0]), draggable_points[5], 3)
pygame.draw.line(screen, black, draggable_points[5], draggable_points[0], 3)
# Draw the finish button
pygame.draw.rect(screen, red, finish_button_rect)
font = pygame.font.Font(None, 24)
text = font.render("Back", True, white)
rotated_text = pygame.transform.rotate(text, 90)
screen.blit(rotated_text, (13, 185))
# Draw add button
text_surface = pygame.transform.rotate(font.render("Add", True, white), 90)
text_rect = text_surface.get_rect(center=button_rect.center)
pygame.draw.rect(screen, black, button_rect)
screen.blit(text_surface, text_rect.topleft)
# Update the display
pygame.display.flip()
# control the motor here
# calculate the degree of joint0
deg[0] = calculate_angle(380 - draggable_points[5][1], 160, 220, 110, 180)
deg[1] = calculate_angle(draggable_points[0][0], 120, 220, 0, 120)
for i in range(2, 6):
deg[i] = calculate_angle(draggable_points[i - 1][0], 20, 200, 0, 180)
set_angle(deg)
# function of add button
gestureDict_path = "/home/pi/robotArm/temp/gesture.json"
gesture_number = 20
if add_button:
print("add button pressed")
with open(gestureDict_path, "r") as f:
gestureDict = json.load(f)
add_gesture = -1
for i in range(gesture_number):
if gestureDict.get(str(i), -1) == -1:
add_gesture = i
print("NONE")
break
print(add_gesture)
# if add too much gesture, render a hint not too add more
if add_gesture == -1:
text_surface = pygame.transform.rotate(
font.render("adding too much, delete first", True, (255, 0, 0)),
90,
)
text_rect = text_surface.get_rect(
center=(screen_width // 2, screen_height // 2)
)
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(2)
else:
data_add = deg
render_text = "Successfully Added Gesture " + str(add_gesture)
gestureDict[str(add_gesture)] = data_add
text_surface = pygame.transform.rotate(
font.render(render_text, True, (0, 255, 0)),
90,
)
text_rect = text_surface.get_rect(
center=(screen_width // 2, screen_height // 2)
)
screen.blit(text_surface, text_rect)
pygame.display.flip()
time.sleep(1)
with open(gestureDict_path, "w") as file:
json.dump(gestureDict, file, indent=2)
add_button = False
# pi.stop()
return False